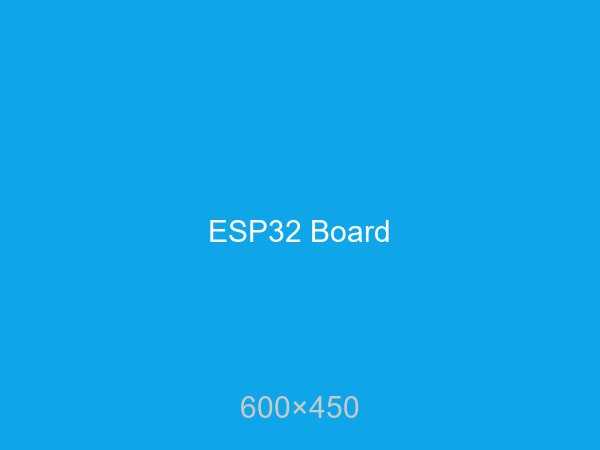
Experimental Platform | Complete Hardware & Software Solution
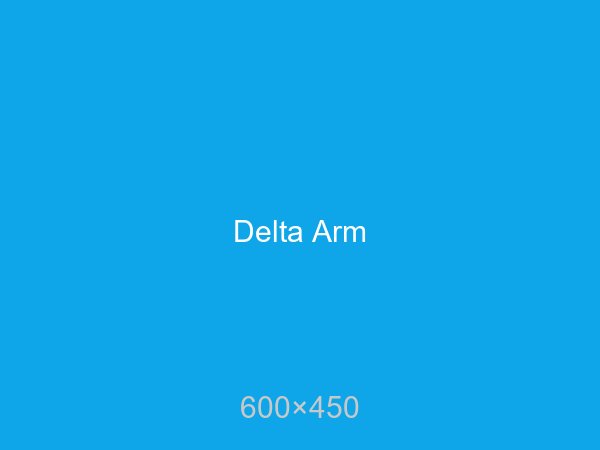
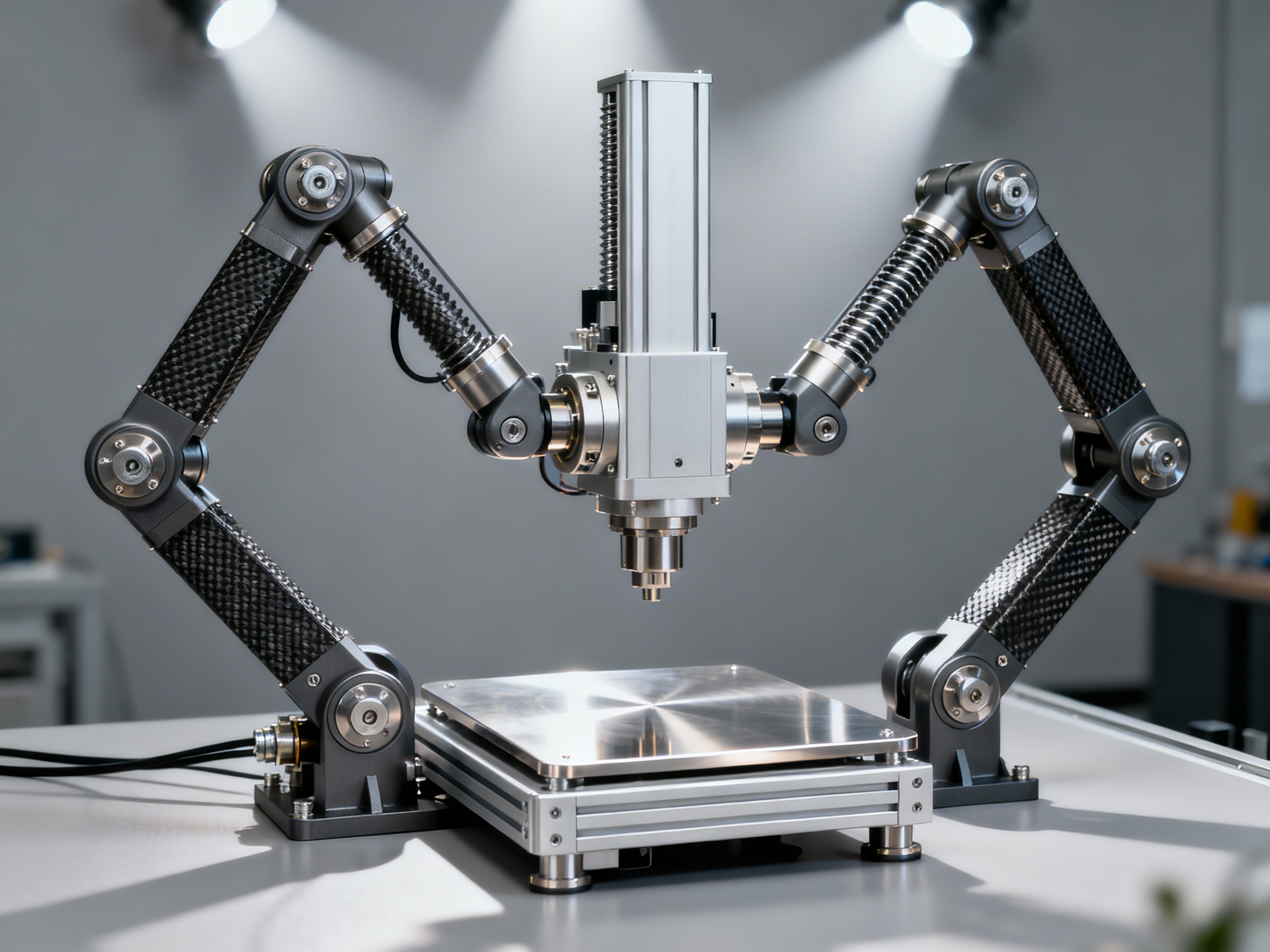
Delta Parallel Robot
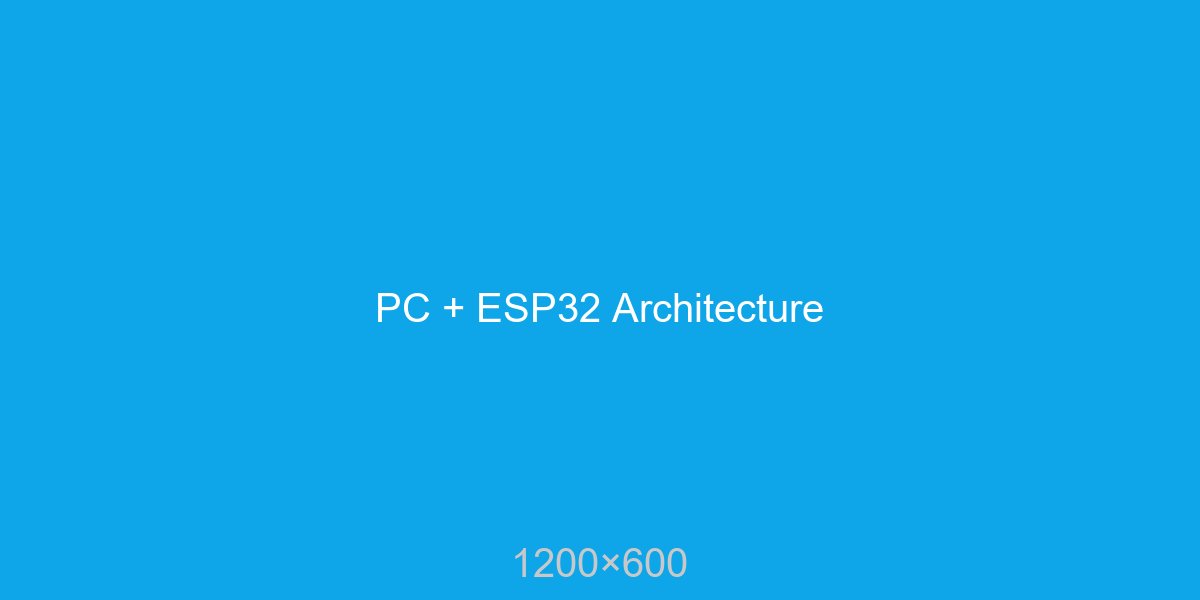
Prototyping System
Complete Software & Hardware Reference Design
Perfect for experiments, learning, and research projects
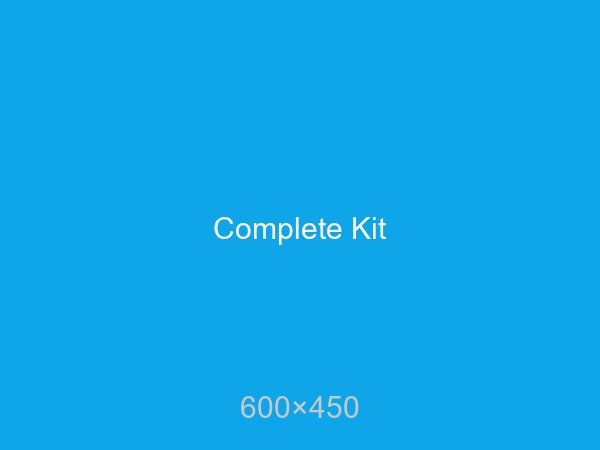
Complete Solution
Hardware + Software + Docs
Full Source Code
Included with purchase
Ready to Experiment
Pre-tested reference design
Full source code and documentation included with hardware kit purchase. Email service@nenpower.com after purchase to receive access.