Hardware Assembly Guide
Estimated Time: 2-3 hours | Difficulty: Intermediate
Kit Checklist
| Category | Component | Quantity | ✓ |
|---|---|---|---|
| Mechanical Parts | Delta Robot Arm | 1 | □ |
| Aluminum Frame Base (2020) | 1 | □ | |
| 3D-Printed Upper Arms (150mm) + Metal Lower Linkages (281mm) | 6 | □ | |
| Ball Joints | 12 | □ | |
| End Effector Mounting Plate | 1 | □ | |
| Electronic Components | ESP32 Development Board | 1 | □ |
| NEMA17 Stepper Motor (1.8°) | 3 | □ | |
| A4988 Driver Board | 3 | □ | |
| 12V 3A Power Adapter | 1 | □ | |
| USB Data Cable | 1 | □ | |
| Terminal Blocks/Dupont Wires | 1 set | □ | |
| Pneumatic System | 12V Vacuum Pump | 1 | □ |
| Solenoid Valve | 1 | □ | |
| Suction Cup (Ø20mm) | 1 | □ | |
| Pneumatic Tubing | 2m | □ |
Tool Preparation
Required Tools
- Phillips Screwdriver (PH2)
- Hex Key Set (1.5-5mm)
- Wire Cutters
- Wire Strippers
- Multimeter (voltage/continuity test)
Optional Tools
- Heat Gun (for heat shrink tubing)
- Soldering Station (if soldering required)
- Digital Calipers (precise measurement)
- Label Printer (cable marking)
Assembly Steps
Step 1: Base Assembly
- Build base frame using aluminum extrusions
- Install three motor mounting plates (120° evenly distributed)
- Ensure base is level and stable
Step 2: Motor Installation
- Mount 3 NEMA17 motors to the base
- Install gears (gear ratio 4.5:1)
- Ensure motor shaft aligns with base center
⚠️ Important: Motor orientation matters, ensure output shaft faces upward.
Step 3: Arm Assembly
- Connect upper arm (150mm) to motor output shaft
- Connect lower arm (281mm) to upper arm ball joint
- Repeat 3 times to assemble 3 arm sets
- Ensure ball joints move smoothly
Step 4: End Effector
- Connect 3 lower arms to end effector platform
- Install suction cup mount (50mm offset)
- Connect pneumatic tubing to suction cup
Step 5: Pneumatic System
- Mount vacuum pump to base
- Install solenoid valve
- Connect air path: pump → valve → suction cup
- Ensure tubing connections are secure with no air leaks
Wiring Guide
⚠️ Power Off: Ensure all power is disconnected during wiring!
ESP32 Pin Assignment Table
| Function | ESP32 Pin | Connect To |
|---|---|---|
| Motor X (A-axis) | ||
| Step Pulse | GPIO 14 | A4988 STEP |
| Direction | GPIO 27 | A4988 DIR |
| Endstop | GPIO 36 | Limit Switch (X_MIN) |
| Motor Y (B-axis) | ||
| Step Pulse | GPIO 26 | A4988 STEP |
| Direction | GPIO 25 | A4988 DIR |
| Endstop | GPIO 39 | Limit Switch (Y_MIN) |
| Motor Z (C-axis) | ||
| Step Pulse | GPIO 33 | A4988 STEP |
| Direction | GPIO 32 | A4988 DIR |
| Endstop | GPIO 34 | Limit Switch (Z_MIN) |
| Shared / Peripherals | ||
| Motor Enable | GPIO 12 | A4988 ENABLE (3x shared) |
| Vacuum Pump | GPIO 21 | Pump Control |
| Solenoid Valve | GPIO 16 | PWM Valve Control |
| Conveyor Step | GPIO 2 | Conveyor Motor STEP (PWM) |
| Conveyor Dir | GPIO 15 | Conveyor Motor DIR |
| Conveyor Enable | GPIO 4 | Conveyor Motor ENABLE |
Complete Wiring Diagram
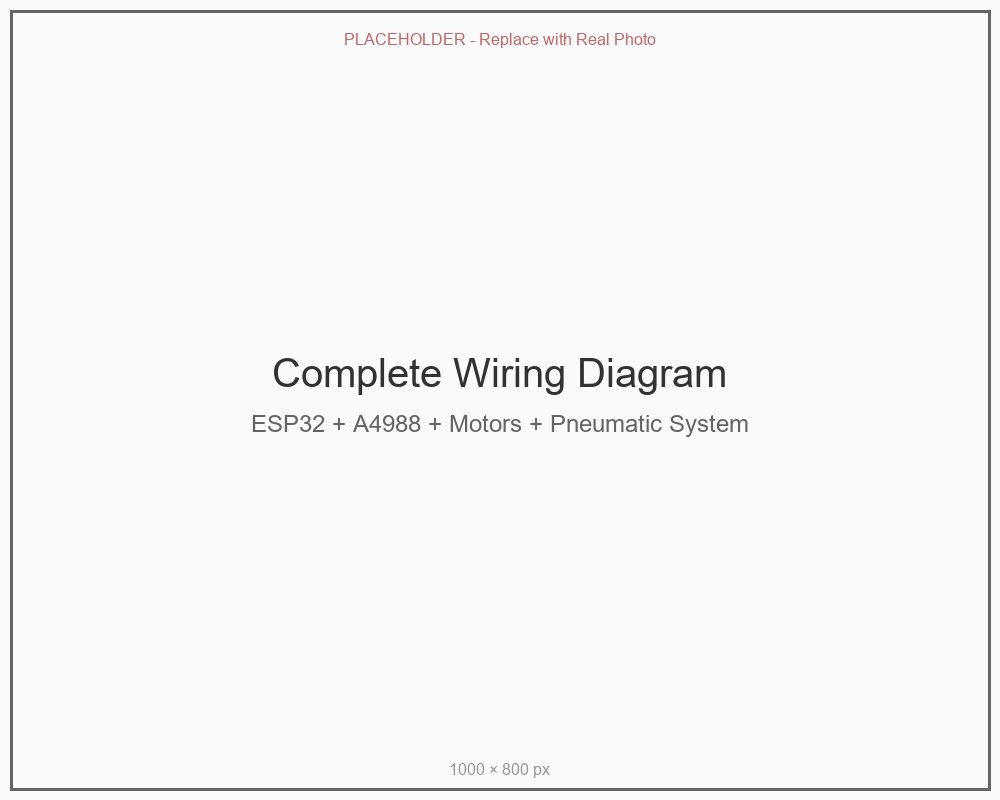
Complete system wiring diagram (click to enlarge)
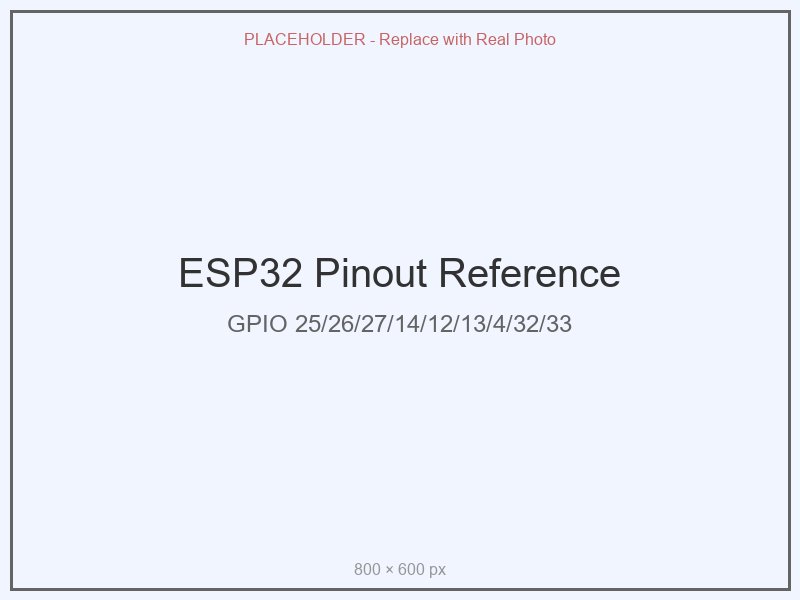
ESP32 detailed pinout diagram
Wiring Precautions
- Power Polarity: Verify +12V and GND connections
- Motor Phase: Don't reverse A4988's 1A/1B/2A/2B
- Logic Level: ESP32 outputs 3.3V, A4988 accepts this
- Common Ground: ESP32 and power GND must be connected
- Relays: Use optoisolated relays (recommended)
Initial Power-On Check
1. Pre-Power Check
2. Power-On Test
- Connect 12V power supply
- ESP32 onboard LED should light up (blue or red)
- A4988 indicator LEDs should light up (green)
- Touch A4988, should be slightly warm (not hot)
3. Motor Enable Test
# Send command via serial port
M17 # Enable motors
# Motors should now lock (resistance when turned by hand)
M18 # Disable motors
# Motors should now release (free rotation)
✅ Check Passed
If all LEDs are normal and motors can enable/disable, hardware connections are correct!